今日が打上げの2日目です。
ロケットで3,000mまで打ち上げて放出し、パラシュートで降下するので、風はとても重要なパラメーターです。
目指すべきゴールは、射点から2km程度のところに設定されていますが、風が強いとゴールの反対側に5km以上流されたりもします。
運が良ければゴール側に流されることもあります。
なので、どの方向にどの程度流されるかはとても重要なのですが、上空と地表では風向きも強さも異なっていたりもして、それらを読むのは難しい。
で、結局は風が無い時に打ち上げるのが最善ということになります。
砂漠に限ったことでは無いのかもしれませんが、朝の気温が低いうちは風は弱く、気温が上がるにつれて強くなってきます。
なので、打ち上げるなら朝イチがベストです。
というわけで、7時に砂漠到着。気温は12度。

打上げは8時半頃準備完了。
ロケットに搭載します。
今回のロケットのオーナーはジョンさん。アメリカロケット協会の偉い人みたいです。
機体島最後は、発射台に運んで…
発射準備完了。
ヒロヨシの熱いアナウンス(英語)の後、カウントダウンで、発射!
その後、機体を捜索するのですが、なかなか見付かりません。
打ち上げたロケットは、上空で分解して3つのピースで、それぞれのパラシュートで降下します。それらは、それぞれが異なるスピードで降下してくるので、3つがほぼ直線状に着地します。
走り始める前に見つけないと、我々の機体の走行速度は速いので、機体が先にゴールに向かってしまうかもしれません。
そうなったら、小さな機体を見つけるのはより困難になるので、着地点のデータが取れないどころか、感動的な走行シーンも見られない。
我々の機体は、ロケットに比べて降下速度が早くなるように設計されているので、大抵はロケットの着地点を結ぶ直線の風上側に着地するはずなのですが…
無い?
その後、想定外のエリアで機体を発見。射点から北東へ3.3kmのところです。
この際、距離はどうでも良いのですが、パラシュートが見当たらず、機体が動作するタイミングになっても停止したまま。
何か変です。
良く見ると、機体は損傷しているし、地面には強いインパクトの跡が残っています。
で、パラシュートが周辺に無いということは…
そう、フリーフォール(自由落下)です。
恐らく損傷の度合いからして、ロケット放出直後では無いと思います。
その場合、時速300kmくらいの落下速度になるでしょうから。こんなものでは済まないでしょう。
恐らく、途中までは正常に降下していて、何かしらの原因でパラシュート分離の制御が入ってしまった模様。
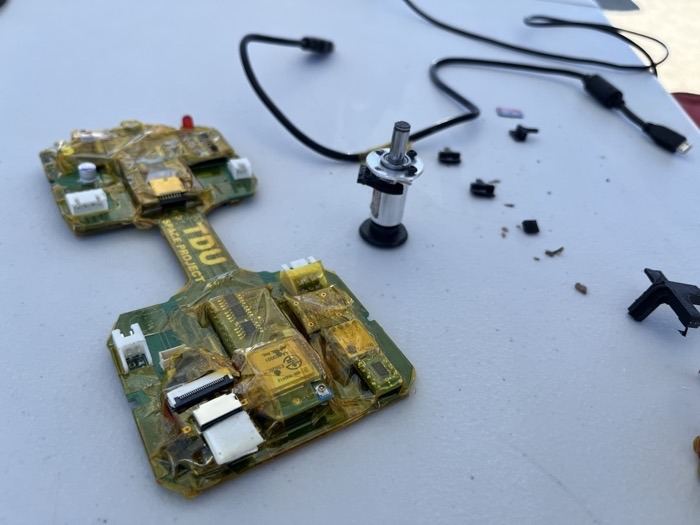
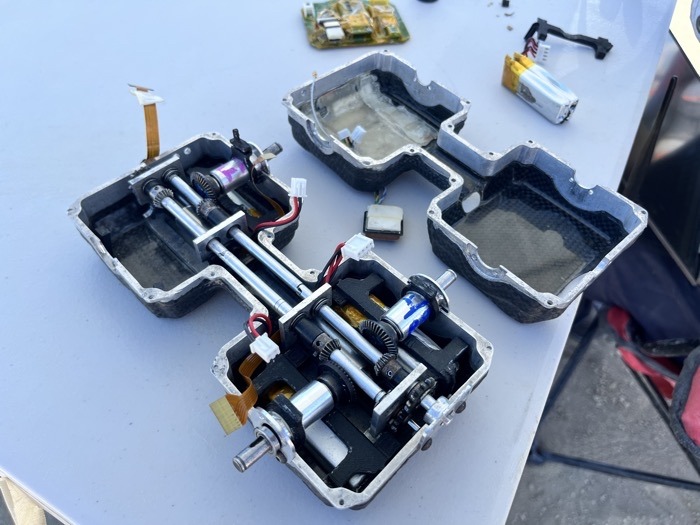
現地で簡単に検証してみたところ、ホイールの破損、駆動系の破損、制御基板上の部品の破損などは確認できました。
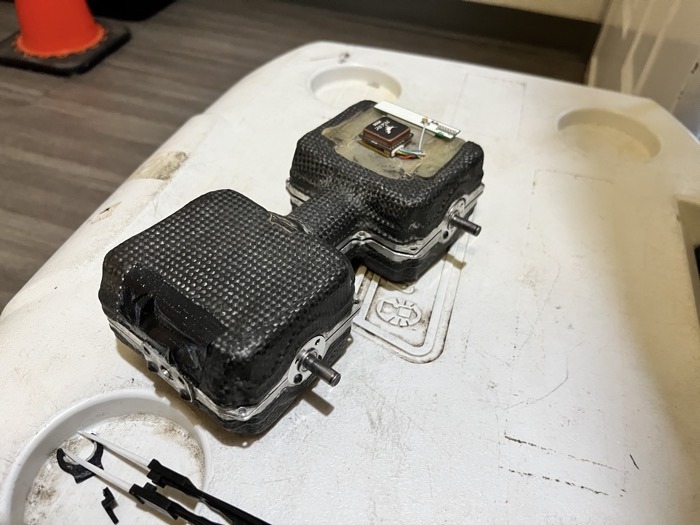
カーボンファイバー製のホイールが損傷したということは、やはりかなりの衝撃を伴って着地したことが分かります。
でも、カーボンファイバー製のホイールだったからこそ、機体の損傷がこの程度で済んだということでもあります。
ちなみに、昨年優勝したSuper NOVAという最強のチームがいるのですが、本日の打上げでは、ロケットが数百メートル上昇した時点で爆発してしまったそうです。
機体は無事に降下して、爆発の衝撃で正常に動作しなくなってしまったとのこと。
我々も過去には、機体がロケットから放出されずに、パラシュートも開かずに、時速300kmで地面に激突して木っ端みじんになったことがあります。
が、ロケットが爆発ってのは、聞いたことがありません、
おっと!
とにかく宿に帰って修復を急ぎ、原因究明と対策をしなければなりません。
宿での詳細な検証の結果、機体は何とか修復できそうです。
また、機体の制御ログの解析の結果、空中でのパラシュート分離は確かに起きていて、プログラム上のエラーが原因であることも分かりました。
さて、これらの問題を解決して、明日も朝イチの打上げを目指しますよ。