実は、私の研究室では2011年頃に電動バイクの研究をしていました。
とは言っても、ただのバイクではなく、最高速チャレンジ用のレーシングマシンです。
アメリカのユタ州にあるボンネビル・ソルトフラッツという広大な乾塩湖で毎年夏に行われる最高速チャレンジのイベントがあります。そこに電動バイクで出場して速度記録を更新することを目標に開発を進めていました。

この時は、別に電動車両に未来を感じたとか、特別な思い入れがあったわけでは無いのです。
速度記録のイベントは、排気量や車体の形態ごとにクラスが分かれており、それぞれのクラスで記録を競うのですが、電動クラスは出場者が少なかったので記録を狙いやすいかな、と思ったのです。
あとは、やはりインパクトですね。「電動のマシンで世界一」なんて目立つこと間違いなし!
私は、お師匠様である佐野彰一先生の教え「最初に最高を目指すんだよ」に従って、こういうことをやる時は、どうやって一番を取るかを考えることにしてます。
でもたぶん、私はこの教えを曲解しています。佐野先生はそこまで極端なことは言っていなかったと思います。
「最初に小さいことをやっても誰も注目してくれないから、その先が続かなくなっちゃうんだよ」というようなニュアンスだったと思います。
人のせいにしちゃいけませんね。
でも、日本で最初にF1マシンを開発して一等賞になった方が仰ったのだし、単純に最高を目指した方が面白いので、そういうことにしています。
その方がワクワクするでしょう?
確か当時の電動クラスの記録は時速280kmくらいだったと思います。
で、色々検討してみたら、どうやらこれを50キロくらい上回ることは可能だぞ、世界一を獲るぞ!ということになったわけです。
速度記録のマシンに要求されるものは、簡単に言うと小さな空気抵抗と大きな馬力です。
時速300キロを優に超える領域では、空気抵抗が凄く重要です。
空気抵抗を小さくするために必要なことは、前面投影面積と呼ばれるマシンを前から見たときの面積をいかに小さくするか。それがまず一つ。
そして空気抵抗係数です。この係数はマシンの形で決まります。車体の後ろで空気が渦を巻かないかとか、そういうことです。ドラッグって呼ばれますね。
これらが基本的なところ。
エンジンで走るマシンは、空気抵抗を考える上でエンジン自体の大きさがネックになってきます。
一般的なバイクの場合、ライダーがエンジンに覆い被さるように乗るので、必然的に前面投影面積が大きくなるのです。これはもうどうしようもない。
電動車両の良いところは、まずモーターが小さいことと、バッテリーは小さなバッテリーの集合体なので、搭載時の形に自由度があるので、低く細く配置できます。
つまり、前面投影面積をかなり小さく抑えられる可能性があるぞ、と。
車体の主要部品などをどのように配置するかというのを「パッケージング」と言いますが、EVはその自由度が凄く高い。ここが最大のポイントでした。
エンジンのマシンでは不可能なレベルのパッケージングが可能なのです。
あと、こういう開発をやる場合、ただ設計して作っただけではダメで、最も重要なことの一つが完成後のテストなのですが、エンジンのマシンでは国内で十分にテストするのは難しいことは分かっていました。
そして、イベントが行われるのは標高1200mくらいで空気が薄いので、エンジンであればセッティングの変更が必要になるはずです。
ただでさえ現地に行ってからやることは多いはずで、調整作業が多いマシンでは、時間に限りがある学生達には手に負えなくなる可能性がある。
EVであれば、海抜0mでも1200mでもさほど変わらないので、国内で動力試験をした結果がそのまま現地で再現できるだろうし、むしろ空気が薄ければ空気抵抗が減るので有利になるという考えがありました。
であれば、現地で問題になる可能性があるのは操縦安定性くらいだろうから、何とかなるかもしれんな。と。
まぁ、そここそが最も難しいところだと思うのですが、問題を絞り込めるのはありがたいことです。
じゃぁ、早速デカいパワーの発生源を探そう、ということになって、必要なコンポーネントを探したら、某国製のモーターで、直径300ミリくらいで200馬力とか出ちゃうのを発見しました。
この時残念に思ったのは、日本製は無いんですよね。
実は国内のあるモーターのメーカーに連絡を取ってみたわけです。
「世界最速の電動バイクを作るので、モーターを開発してくれませんか?」
と仕様を提示してみました。
そうしたら
「そんなの無理だ。モーターの直径は2メートルくらいになる」
という返事でした。オールジャパンでいきたかったので、ちょっと残念でしたね。
まぁ、うさんくさいし、お金にならないから断っちゃえってことだったのだと思いますが。
なので、残念でしたがパワーソースのモーターは輸入することにしました。
凄いバッテリーも日本製は無かったので、これまた世界最強の某国製を選定しました。
その後、色々検討していたら、問題になってくるのはパワーだけじゃなくて、高速域での操縦安定性だぞということが分かりました。
安定しないマシンは高い速度では走れません。ライダーの技術がどうこうではないのです。
オートバイに限らず、車体の捻りとか曲げとかの剛性はバネみたいなもので、速度に応じて共振が起こります。これが高い速度域で発生しちゃうと致命的なことが起きます。突然転倒しちゃうとか。
その特性は計算で出すことができます。ですが超難易度が高いのです。
でも、ウチの学部4年生がやっちゃいました。
で、シミュレーションをしたら、これはいけるぞ!と。
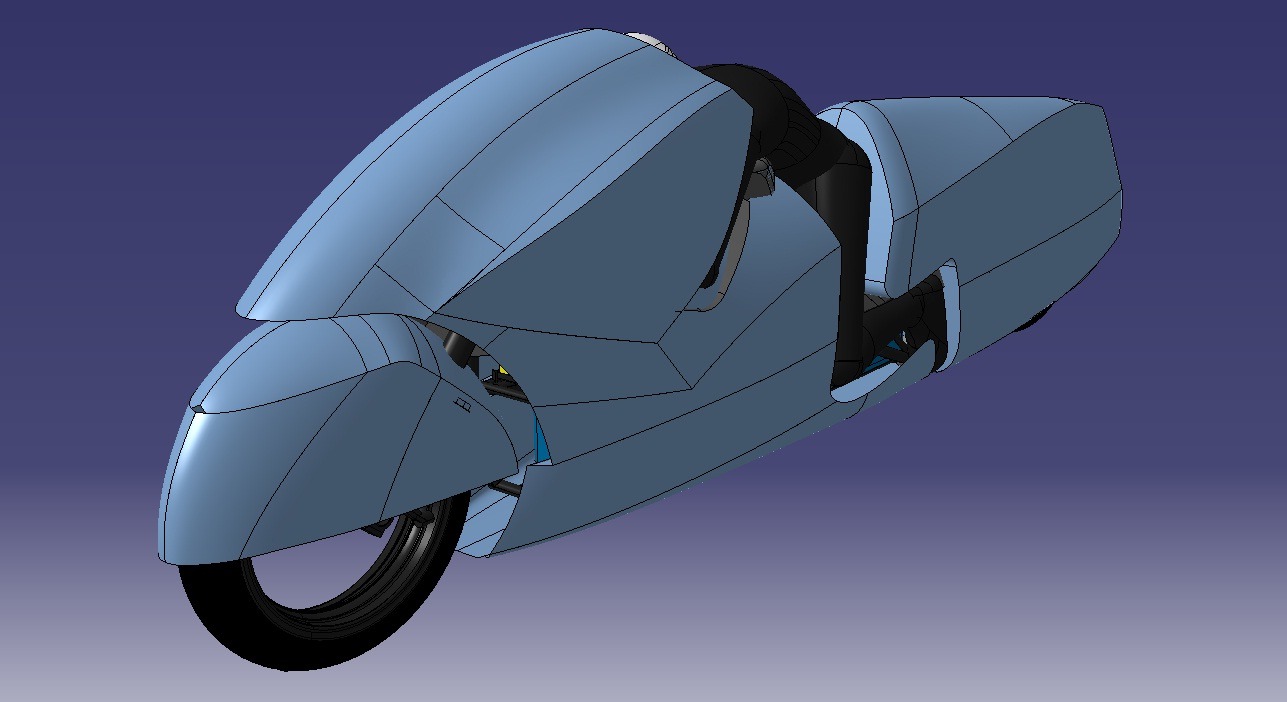
クレイモデルも作ったのですけどね
ここまで色々検討した結果、EVって結構計算通りに性能を出せるんじゃないか、と分かってきました。
「やってみないと分からん」という領域がエンジンよりも少ない気がします。
とはいえ最終的には、やはりやってみないと分からんのですけどね。
マシン全体を見渡しても、技術的にできない部分は見当たりませんでした。
なので、あとはとにかく作ってみて、やってみないと分からん部分を潰し込むだけです。
ただ、他にも問題はあって…
現地でどうやって充電するかとか
車体が重いので、タイヤが負荷に耐えるだろうかとか
モーターもバッテリーもお金がかかりすぎるとか
そんな難問も協力者が現れたりして、一つずつ解決していったところで、東日本大震災が起きたのです。
当然ですが、マシンを作るどころではなくなり、計画は中止となりました。
この時の学生達は、さぞ大変だったと思います。
メンタル面の負荷は、コロナ禍の比ではなかったでしょう。
でもこれは、とても良い経験になりました。
学生でもやればできるという見通しが立ったし。
…でも、まだ完全に終わったとは思ってなかったりして。