機体にトラブル発生!
搭載した通信モジュールが動作しません。
コータローは朝から対策に追われていました。
 通常なら難なく動作するはずのものが動作せず
通常なら難なく動作するはずのものが動作せず
あいにくスペアパーツも無し
ずっと宿の部屋に籠もりっきりで、延々とトラブルシュートを続けます
昼は近所のコンビニに買い出しに行きました。
ここ、南種子町には1件しかコンビニがありません。
唯一のコンビニはファミリーマートなのですが、かつてここはエブリワンという九州のコンビニチェーンのお店がありました。
弁当とか店内で焼いているパンが秀逸で、大好きだったのですが、いつの間にやらファミリーマートになってしまいました。
でも、弁当やパンは変わらずに残っていたので、ちょっと安心。
巨大な「ばくだんおむすび」
島内で作っています
そもそも種子島にはコンビニエンスストアがあまりありません。
島内で記憶に残っているのは3件くらい。
調べてみたところファミリーマートが4軒ありますね。
他は種子島ローカルのお店が数件あります。
では不便なのか?というと決してそんなことは感じません。
来る度に「こんなもんでいいんじゃないかな」と思います。
いかに日頃、あらゆるものが過剰な環境で生活しているのかが、ここに来ると実感できます。
ここには昭和な雑貨屋がいまだに沢山残っているわけですが、そういうお店に行くと思うのです。
「こんにちはー!」
とお店に入って、買い物ついでに雑談したりして、これが望ましい本来の姿だよな、と。
便利さと引き換えに人間性を失う、なんて言ったら大げさかもしれませんが、でもここに来て気付くのはそういうことです。
本来であれば、今日はテスト走行をして機体の最適化をするはずでしたので、コータローと一緒に車で近所の公園に行くはずでしたが、日中は本を読んだり…
宿にある南国の盆栽
何というか…迫力がありますね
夕方6時ごろ
「やりました!分かりました!!」
ついにトラブル解決です。
おお、良かったよかった。
原因は、基本的な部分に関するもので、いわゆる凡ミスですが、こういうトラブルがなかなか解決しないのは良くある話です。
「こんなところが間違っているはずは無い」
と思って(「思いもせずに」かもしれません)、視野の外に出してしまったものは意識することができませんから。
人間は間違えるものです。
なので、トラブルシュートの基本は、間違えるはずが無いと思っているところから順に確認することです。
本来、今回やっている作業も含めて、大学で済ませておくべきことなのですが、それも含めて良い経験になっていると思います。
こういうことは、あらかじめ口頭で教えておいたり、マニュアル化することもできますが、単に受け身で知識として知ったことと、自分で身をもって知ったことは大きく異なります。
コータロー、良い経験してます。
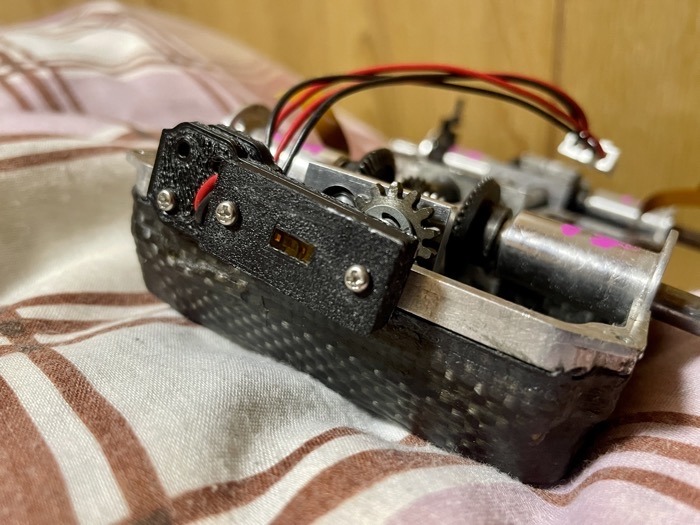
ちょうど機体が分解されているので写真を上げておきましょう。
左から駆動機構が組まれた下部ボディ、上部ボディ、内部基板
本当は、この機体は上も下も無い設計です
基板上には複数のマイコン、GPSアンテナ、各種センサーを搭載
この四角いのが今回の新ネタ、レーザー測距センサー