
朝6時30分に会場に到着してテスト走行開始。
ところが、AIを利用した画像認識はシステムの都合上うまくいかないことが判明。
早々にGPSを利用した誘導制御に方針変更。
うまく行かなければどうするか?リスクマネジメントは大事です。

結果、これまでに無いスムーズな走行ができました。
その後は、高度を判定するセンサーや無線システムなどのチェック。
全てクリア。
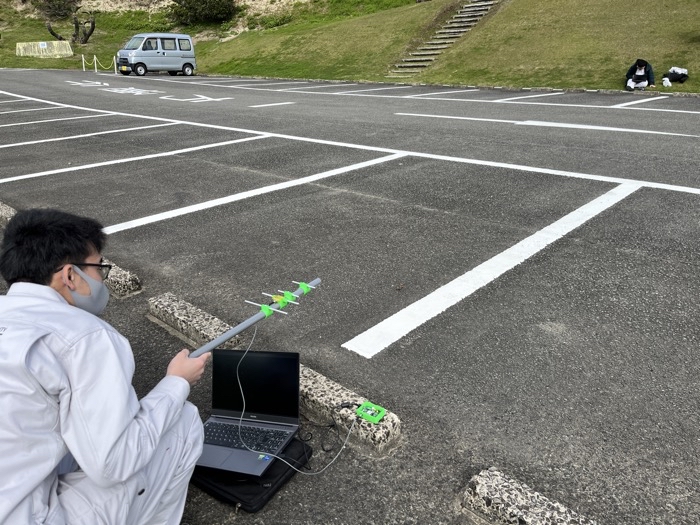
無線担当はツノダクン。
手製の八木アンテナで機体が発する微弱な電波を拾って、状態をチェックできるシステムは快調に動作してます。
コータロー、自信満々。
こんなに余裕を持って出番を待つことはかつてありませんでした。

午後4時過ぎ、投下順が近づいてきました。
機体を投下装置に装填して…

クレーンで上空に吊り上げたら、カウントダウン後に投下。

驚くほど速くスムーズに、直線的にゴールに到達。
所要時間は44秒。距離は2.3mでした。
画像認識が無く、GPSでのゴールならこんなものでしょう。上出来です。


これにて我々の競技は終了です。
なお、今日投下した38チームのうち、ゴールしたのは我々を含む3チームのみ。
去年まではゴールからの距離のみが評価指針でしたが、今大会からは所要時間も加味されるそうなので、結果は表彰式でのお楽しみってところです。
明日は、我々が参加したゴール到達を目指す部門とは別の、投下した機体で何らかのミッションを行う部門が開催されます。
我が東京電機大学の千住キャンパスチームがエントリーしているので、是非彼らにも頑張って欲しいところです。期待しましょう。