
打上げは今日と明日の2日間。
朝は風が弱いので、打ち上げをするなら朝イチということで、今日も4時半起床の5時出発。
現地には7時くらいに到着。
気温は10度を下回っていました。
早速走行テスト

まあまあ良い感じです。
借りのゴールを設定してのテスト走行では、ちゃんとゴールしました。
では、早速打上げを…
と思ったら

メカニカルな不具合発見。
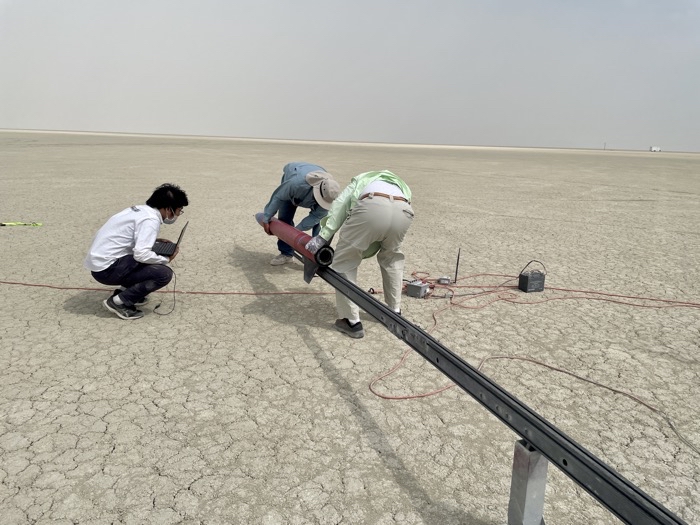
ロケットに機体を装填して、最後にロケット先端のノーズコーンを取り付けている際に、ロケット内部で機体が動き始めてしまいました。
今回の機体は、気圧センサーを内蔵していて、気圧の変化を読み取って動作スタートとなるのですが、ノーズコーンを装着する際に、ロケット内部の気圧の上昇を地上に着地したものと判断して走行を開始してしまったのです。
よって、機体のプログラムを変更しようとロケットから取り出したら、パラシュート分離装置の不具合を発見。
急いで改修作業を行って、再度ロケットに装填。
早朝は微風でしたが、その頃にはかなり風が強くなっていました。

今度はOKです。
そして射点にロケットを運んで

発射台にセット
記念撮影をして

発射!
約6秒で高度4000mまで上昇、放出

ロケットはあっという間に雲を突き抜けて、さらに視界も悪いし風も強いしで、機体を見失ってしまいましたが、何とか発見

動いていません。
地面をよく見ると、止まった機体の風上側に2カ所ほどバウンドした痕跡があります。
どうやら強風のために凄い勢いで地面に叩きつけられて不具合が発生した模様。

我々の一発目の発射はリタイヤに終わりました。
その後はモーテルに戻って原因の解析と対策。
原因は大体分かりました。
強烈な着地衝撃で、パラシュートの分離機構が締め付けられてしまい、着地後の分離動作の祭に電気的に過負荷が掛かって、セットしておいたマイコンの安全装置が作動して動作が停止したようです。
スマホいじってサボっているわけではありません。
原因解析中のコータロー

明日は最後の打上げ日です。
コータロー、どこまで仕上げられるか。